
The Next Gen: Goose VI
After Goose V, the team knew we could go faster.
The major problem with Goose V was the marriage between the linear induction motors and the frame. Successfully mating two 45lb motors within a 3mm gap to the track is no easy task.
Throw in oscillations, track deviations, and the forces associated with a pod moving over 100km/h, and you’ve got a daunting design challenge.
My task as System Integration Lead was to lead the design on mechanical-propulsion systems.
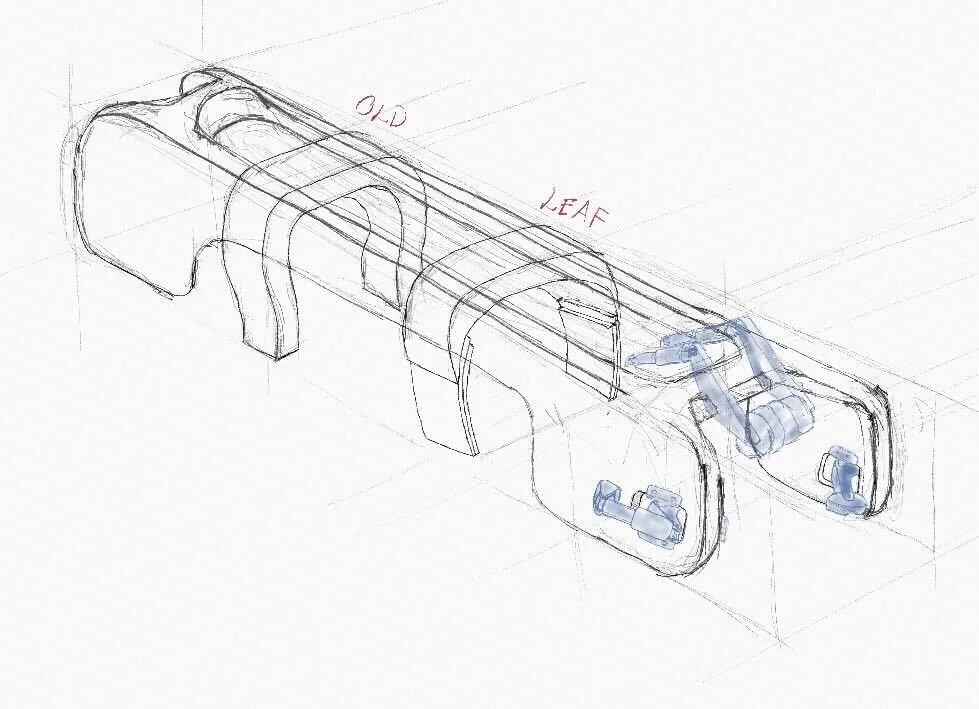
Initial Concept


With G5, there were too many individual, hand-machined parts from the LIM mounting point to the Aluminum chassis (12 to be exact). With all the tolerance stack-up and play, it was impossible to maintain a 3mm airgap consistently.
With G6, the concept was to build around the Linear Induction Motors. The LIM’s are the sole point of propulsion. The idea was to build from the LIM’s up.
Design Process
Unlike other design teams with a long history of iterative designs, designing for mounting linear induction motors is unique. There is very little inspiration or existing designs to draw from. This is one of the reasons I was drawn to this team.
To account for bumps and track deviation, I designed a dual-linkage push-arm suspension system to absorb and redirect energy into a damper connected to the frame.
This system not only mounts the LIM securely to the frame, but ensures debris or track deviation causes damage.






Preliminary design drawings and calculations.
Final Design and Validation
TBD. Coming soon