Building Canada’s Hyperloop
An Overview:
Having a passion for both Mechanical Engineering and sustainable transportation, joining Waterloop was a no-brainer.
During my first term on the team I worked on advancing Linear Induction Motor technology; experimenting with different core geometries and winding patterns to create a contactless propulsion system to drive the pod.
During testing, a major weak point was the mechanical system to attach the Linear Induction Motors to the pod. With my LIM background, I became the system integration lead, heading development of all mechanical systems integrating with the motors.


It all began with some R&D. Trying to make Linear Induction Motors go brrrrrrrrrr
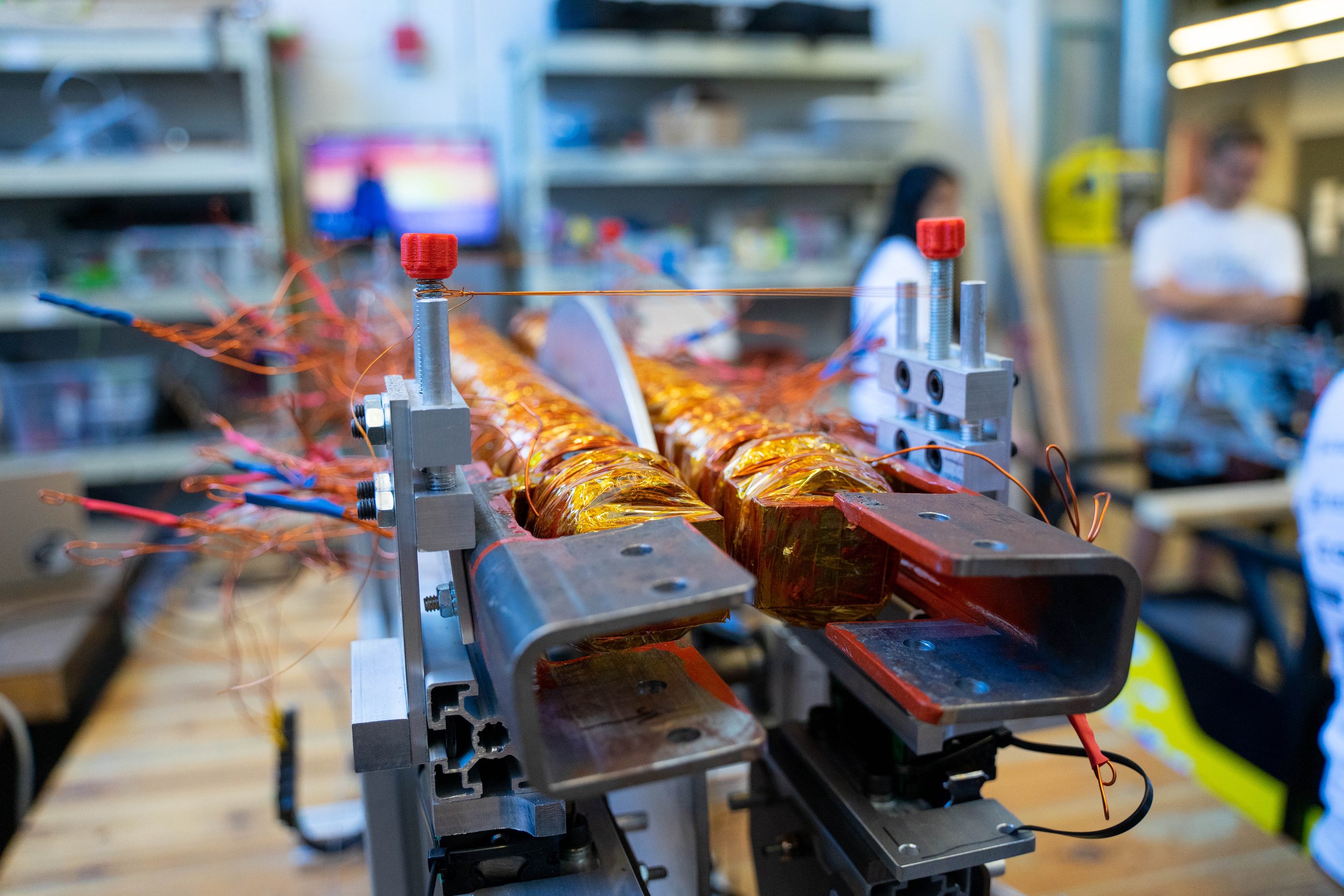
Testing motors!

The pod rolls!

It's all coming together...

Finally, a full sub-system test.

Oops.
LIM Blocked Rotor Test Stand
To determine efficiency, static thrust, and 3-phase circuit parameters, I built a test stand for our newly manufactured linear induction motors.
By combining two load cells using a HX711 board configured with Arduino Uno, we examined how thrust changed with different winding patterns (delta vs. wye) and different current/voltage inputs.
Steel-backed aluminum sheet ran on bearings to eliminate resistance & improve repeatability in results



Goose V moves!
Building a moving pod from start to finish required huge commitment from so many team members and a lot of hard work. I learned how challenging coordinating a massive team working on a massive project can be.
(That’s me with the fire extinguisher… blocking the entire frame)